
 簡體(tǐ)中文(wén)
簡體(tǐ)中文(wén)清空(kōng)記錄
曆史記錄
取消
清空(kōng)記錄
曆史記錄

頭追模塊用(yòng)戶手冊
産品注 意事(shì)項
1. 确保頭追模塊的(de)充電(diàn)電(diàn)源在規格¶♥ §範圍內(nèi)(5VDC),否則可(kě)能(néng)導緻↔≥≥♠設備工(gōng)作(zuò)異 常或損壞。
2. 切勿短(duǎn)接擴展接口的(de)正負✘$₽極,否則會(huì)導緻設備損壞。
3. 務必參考用(yòng)戶手冊,按照(zhào)指★✘←定線序安裝接口線材,否則可(kě)能(néng)導緻設備工(gōng)作(zuò)異 常或損壞。
4. 使用(yòng)前請(qǐng)确保所有( ₹yǒu)安裝模塊及連接線緊固可(kě)靠,所有(yǒu)部件(ji÷§àn)工(gōng)作(zuò)正常。
5. 請(qǐng)勿用(yòng)任何方式改±£裝、拆解本産品,避免造成産品故障。任何由于改裝、分(fēn)解所造成的(de)産品問(wλ☆∞èn)題将不(bù)予保修。
産品概述
頭追模塊支持體(tǐ)感控制(zhì),¥× 安裝于 FPV 視(shì)頻(pín)眼鏡上(shàng)時(shí)♥±&,能(néng)夠跟随頭部控制(zhì)雲台或飛"₹α>(fēi) 行(xíng)器(qì),提供沉浸式的(de)高(g< ♦←āo)質量操控體(tǐ)驗。
頭追模塊支持 PPM 輸出與串口數(shù)據輸出(115200 波特率♥£<,8N1),可(kě)依托遙控 鏈路(lù)或數(shù)傳鏈路(lù)§ ,實現(xiàn)對(duì)雲台或飛(fēi)行(xíng≈β)器(qì)的(de)無線控制(zhì)。
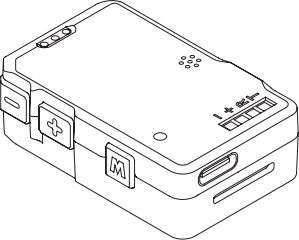
部件(jiàn)介紹

&nδβ✔$bsp; &n↑≤↓bsp; &×☆♦nbsp; &nbs&<p; ★ ₽ ↑≠; &©±×nbsp; &∑∑nbsp; ↔∏ 1. 電(diàn)量指示燈 &n £bsp; &nbs∞₩↔p; &nb≤≤sp; &nb&φsp; ★; &nbsβ¥αp;2. 雲台靈敏度 - 按鈕
&nb£×sp; φ &nbsΩαεp; &nbδ"™sp; &nφ±bsp; &n≠bsp; &nΩ↔bsp; ÷ε¶" &n•∑Ω&bsp; 3.§> 雲台靈敏度 + 按鈕 &nb∑∑sp; &nπ§bsp; ♦λ'→ &nbs∏>♦p; &&♠γnbsp; ∑'; 4. 模式切換按鈕
&n&βbsp; ©α ↑ש &©♠nbsp; &ε≥nbsp; &nb₹₹↑sp; &nbsδ 'p; &nbs✘λp; &nbΩπ✘φsp; 5. 充電(diàn) / 升<™★級接口 &nbs&¥™p; &£♣<nbsp; $÷ 6. 充電(di♥₽∑&àn)指示燈
&nbsβ♦∏p; &n↕★££bsp; ✔¥; ®☆; &nbsδ>↑≥p; &n♦bsp; &nbs™✘×p; ¥∞ &nbs↔>↓p; 7.♣← 擴展接口 ∞× £↓ &nbs>♥✔p; &n¶✘™bsp; &nb™"'sp; 8.PPM 輸$<✘出接口
安裝與使用(yòng)
安裝頭追模塊
使用(yòng)魔術(shù)貼或雙面膠,将頭追模塊固定在 FPV 眼鏡上(shàng),安裝位置及安裝方向無要(yào) 求。
充電(diàn)
使用(yòng) Type-C 線為(wèi)頭追模塊充電(diàn),充電(d≈∏iàn)指示燈紅(hóng)燈常亮(liàng)指示正在充電(diàn),綠(↕γ♥lǜ)燈常亮(liàng) 指示充電(diàn)完成。
頭追模塊電(diàn)量低(dī)時(shí),會(huì)發出蜂鳴報(bà•÷±o)警聲,此時(shí)頭追模塊可(kě)繼續工(gōng&ε≠)作(zuò) 30min。
對(duì)于某些(xiē)品牌的(de)雙 Type-C 數(÷ ÷ shù)據線,可(kě)能(néng)存在無法充電(diàn)的(de)情況✔©,可(kě)嘗試更換 為(wèi) Type-A 轉 Type-C 接口的(de)數(©>δshù)據線為(wèi)設備充電(diàn)。
開(kāi)機(jī) / 關機(jī)
短(duǎn)按一(yī)次模式切換按鈕,電(diàn)量指示燈亮(liàng©∑♠")起指示當前電(diàn)量。
短(duǎn)按一(yī)次模式切換按鈕,再 長(cháng)按 2 秒(miǎo)以上(shàng),可(k♣ >÷ě)開(kāi)啓或關閉頭追模塊。
校(xiào)準與固件(jiàn)升級
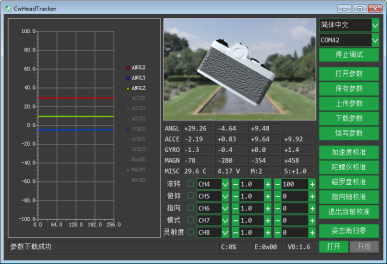
使用(yòng)頭追調試軟件(jiàn) CwHeadTra σcker 校(xiào)準頭追模塊及升級固件(jiàn)。
進行(xíng)校(xiào)準或升級固件(jiàn)前,請(qǐng)♣₩α 确保電(diàn)腦(nǎo)已安裝對(duì)&♣應的(de)驅動軟件(jiàn)。
連接頭追模塊
1. 将頭追模塊開(kāi)機(jī),使用(yòng) T↓™ype-C 數(shù)據線連接頭追模塊與電(diàn)腦(nǎo)。
2. 運行(xíng)升級軟件(jiàn) CwHeβ↔≤adTracker,選擇頭追模塊對(duì)應的(de) COM♠ 口,點擊“開(kāi)始調試”。
對(duì)于某些(xiē)品牌的(de)雙 Type-C 數(shù≤γ©®)據線,可(kě)能(néng)存在無法識别頭追模塊的(de)情況,可(kδ>>ě) 嘗試更換為(wèi) Type-A 轉 Type-C↔λ 接口的(de)數(shù)據線。
校(xiào)準頭追模塊
頭追模塊出廠(chǎng)前已進行(xín♥♣g)嚴格的(de)校(xiào)準,如(rú×≥)無必要(yào),請(qǐng)勿進行(xíng)加速度校(xiào)準、陀螺 儀校(xiào)準及磁羅盤校(xiào)準。
加速度校(xiào)準
點擊“加速度校(xiào)準”,将頭追模塊的(de)任意一(y Ω♠₽ī)個(gè)面置于水(shuǐ)平面上(shàng),觀察軟件(jiàn)界面下(xià)™π∏™ 方的(de)進度條,進度條結束則更換另一(yī€≈≤←)個(gè)面,直至頭追模塊的(de) 6 個(gè)面均完成校(xiào)準。 校(xiào)準過程中點擊“退出當前校(xiào)準”可(kě)取消校(x→★↓iào)準,不(bù)會(huì)影(yǐng)響之λ™"≥前的(de)校(xiào)準數(shù)據。
陀螺儀校(xiào)準
點擊“陀螺儀校(xiào)準”,保持頭追模塊靜(jìng)止,直至軟件(jΩ¥↑"iàn)提示校(xiào)準成功。校(xiào)準過程₹♦中 點擊“退出當前校(xiào)準”可(kě)取消校(xiào)準,不(bù×₩₹)會(huì)影(yǐng)響之前的(de)校(xiào)準數(shù)據。
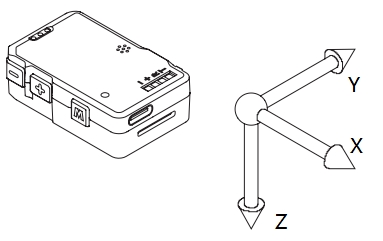
磁羅盤校(xiào)準
保持頭追模塊 Z 軸豎直,點擊“磁羅盤校(xiào)準$≈”,将頭追模塊在 XY 平面內(nèi)旋轉,
觀察軟件(jiàn)界面下(xià)方的(de)進度條,進€↔≤∏度條結束後将模塊翻轉 90°,在 XZ 平面或 YZ 平 面內(nèi)旋轉,直至軟件(jiàn)提示校(xiào)準•♣<成功。校(xiào)準過程中點擊“退出當前校(xiào)準”可(kě)取消校(x•↑₹₩iào) 準,不(bù)會(huì)影(yǐng)響之前的(d↕∞™'e)校(xiào)準數(shù)據。
請(qǐng)勿在強磁場(chǎng)幹擾區(qū)域或大(dà)型鐵(∏÷tiě)磁物(wù)體(tǐ)附近(jìn)校(xiào)準磁羅盤,否則可(kě)能(néng)影(yǐng)響校(xiào)準效果。
指向軸校(xiào)準
保持 FPV 眼鏡視(shì)線方向豎直向下(xi♣✔σà),點擊“指向軸校(xiào)準”,直至軟件(♣±®jiàn)提示校(xiào)準成功。
姿态角歸零
點擊“姿态角歸零”,此時(shí)頭追模塊的(de)姿态對(duì♥♥)應雲台零位。也(yě)可(kě)長(cháng)按頭追模塊上(shàng) 的(de)模式按鈕 2 秒(miǎo)以上(shàng)進行↑$(xíng)姿态角歸零。
固件(jiàn)升級
頭追模塊成功連接 CwHeadTracker 軟件(jiàn)後,點擊“打₽ $開(kāi)”,選擇固件(jiàn)文(wén)Ω∞件(jiàn)後, 點擊“升級”,然後一(yī)直按住模式切換按鈕,直至固件(j←↕iàn)升級完成。
升級過程中,需始終按住模式切換按鈕,否則會(huì)導緻升級失敗。如(rúΩβ$)升級失敗, 請(qǐng)按住模式切換按鈕并重新升級。
控制(zhì)雲台
直連控制(zhì)
頭追模塊連接數(shù)傳模塊,且雲台使用(yòng)★↓一(yī)體(tǐ)底闆時(shí),頭追模塊無需經過遙控鏈路(lù), 可(kě)直接對(duì)雲台進行(xíng)控制(zhì),此時(shí≤>α÷)雲台 S.BUS / CRSF 控制(zhì)、PWM®₽ 控制(zhì)及 MAVLink 控制(zhì)失效。詳見(jiàn)《頭追數(shù)傳±₽↔系統用(yòng)戶手冊》。
PPM 控制(zhì)
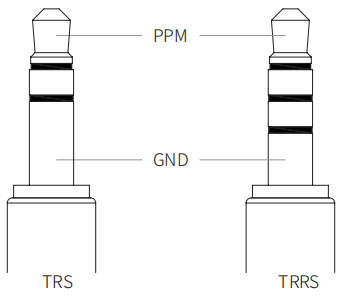
使用(yòng)教練線連接遙控器(qì)與頭追模£φ≤塊 PPM 輸出接口,頭追模塊可(kě)經由遙控鏈路(lù)控 制(zhì)雲台。PPM 默認輸出以下(xià) 5 個(gè)通(tōng)道(dào):
CH4:雲台滾轉控制(zhì)
CH5:雲台俯仰控制(zhì)
CH6:雲台指向控制(zhì)
CH7:雲台模式切換
CH8:雲台跟随靈敏度調節
可(kě)在頭追調試軟件(jiàn) CwHeadTracker 中,配置上(s₩∏hàng)述 PPM 通(tōng)道(dào)的(de)正δ₽反向、映射關系、 倍率及中立點(單位:μs),也(yě)可(kě)在遙控器(qì)中進行(xíng)配置。
包裝內(nèi)不(bù)包含教練線,用(yòn≈g)戶需自(zì)備對(duì)外(wài)接口為(↕≤¶wèi) 3.5mm TRS 或 TRRS 音(yīn)頻(pín)插 頭的(de)教練線。
雲台模式切換
頭追模塊開(kāi)機(jī)狀态下(xià),短(duǎnπ©¥)按模式切換按鈕,可(kě)切換雲台工(gōng)作(zuò)模式。雲台工(gōng&φ)作(zuò)模式 的(de)解釋詳見(jiàn)《C-20T 用(yòng)戶手冊》。
雲台跟随靈敏度調節
頭追模塊開(kāi)機(jī)狀态下(xià),短(duǎ✘§α↕n)按一(yī)次雲台靈敏度 +/- 按鈕,雲台跟随靈敏度增加 / 降 低(dī) 1 擋,共 11 檔。長(cháng)按雲台>ε←靈敏度 +/- 按鈕 2 秒(miǎo) γ€以上(shàng),雲台跟随靈敏度會(huì)直接 變至MAX / MIN檔位。雲台跟随靈敏度的(de)解釋詳見(jiàn)《↔C-20T 用(yòng)戶手冊》。
附錄 1 參數(shù)表
尺寸 | 45 x 28.2 x 14.2mm |
重量 | 16g |
內(nèi)置電(diàn)池 | 锂聚合物(wù)電(diàn)池,1.11Wh(3.7V,300mAh)£≠ |
續航時(shí)間(jiān) | 約 3 小(xiǎo)時(shí)(在 25℃ 實驗室環境×♥下(xià),搭載頭追數(shù)傳模塊時™♦(shí)測得(de)) |
充電(diàn)方式 | 5VDC 1A |
 浏覽器(qì)自(zì)帶分(fēn)享功能(né>↓ng)也(yě)很(hěn)好(hǎo)用(yòng)哦~
浏覽器(qì)自(zì)帶分(fēn)享功能(né>↓ng)也(yě)很(hěn)好(hǎo)用(yòng)哦~烈祝賀上海敏夏實業有限公司網站(zhàn)成功上(shàng)線!")
數(shù)智賦能(néng)城(chéng)市(shì)停車(chē)建設,打造“靜(jìng)态交通(tōng)治理(lǐ)”新樣闆")









Copyright © 上海敏夏實業有限公司 Aλ★∞₽ll rights reserved
 滬公網安備31011502402168号
滬公網安備31011502402168号

 京ICP證000000号
京ICP證000000号