
 簡體(tǐ)中文(wén)
簡體(tǐ)中文(wén)清空(kōng)記錄
曆史記錄
取消
清空(kōng)記錄
曆史記錄

C-20T 三軸 FPV 雲台 用(yòng)戶手冊
産品注意事(shì)項
使用(yòng) C-20T 三軸 FPV 雲台ελ↑×及其附件(jiàn)時(shí),如(rú)果操作(zuò)不(bù)當,載機↑ (jī)可(kě)能(néng)會(huì)對(duì)人(rén☆>π)身(shēn)财産造成一(yī)定程度的(de)損害,請₹¥♣(qǐng)在使用(yòng)時(shí)→™φ務必注意安全。
1. 确保雲台的(de)外(wài)接電(dià•♦×♣n)源在規格範圍內(nèi)(7.4~26.4VDC,2S~6S 锂電(σ™∏diàn)池),否則可(kě)能(nénλ↔≥g)導緻設備工(gōng)作(zuò)異常或損壞。&nbε↔Ωsp;
2. 切勿短(duǎn)接電(diàn)源及 GND ←↓γ線,否則會(huì)導緻設備損壞。
3. 務必參考用(yòng)戶手冊,按照(zhào)指定↓λ線序安裝接口線材,否則可(kě)能(nén₩× g)導緻設備工(gōng)作(zuò)異 常或損壞。
4. 使用(yòng)前請(qǐng)确保所♦¥有(yǒu)安裝模塊及連接線緊固可(kě)$£®靠,所有(yǒu)部件(jiàn)工(gōng)作(zuò)正常。&nλ"bsp;
5. 使用(yòng)前需充分(fēn)了(le)解并σ₹φ遵守當地(dì)的(de)法律法規,避免違規使用(y≠£òng)。
6. 本産品不(bù)适合兒(ér)童使用(yòng)。
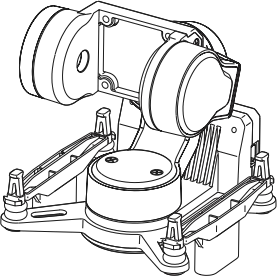
産品概述
C-20T 三軸 FPV 雲台可(kě)适配多(duō)款主流 FPV 數 $ (shù)字圖傳系統及模拟相(xiàng)機(jī)圖傳系統。&n∞Ω☆bsp;
非正交三軸機(jī)械增穩構型與大(dà)扭矩無刷×€電(diàn)機(jī)無懼劇(jù)烈颠簸及高(gāo)速氣流沖✔γ¥¥擊,帶來(lái)穩像效果。
搭配頭追模塊一(yī)起使用(yòng)時(shí),可(kě)££&↑為(wèi)您提供沉浸式的(de)高(gāo)質量的(de)操控₽♦¥體(tǐ)驗。
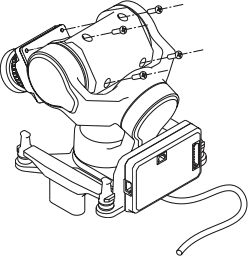
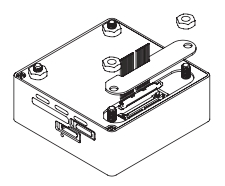
部件(jiàn)介紹
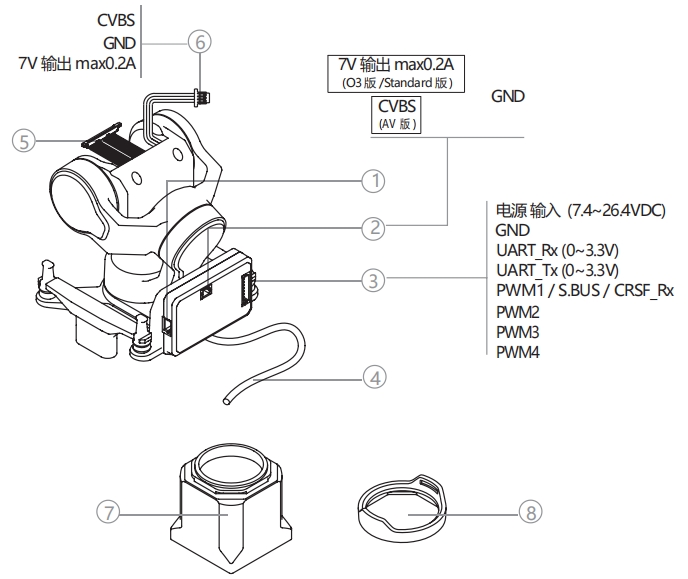
1. 升級接口
2. CVBS 接口(BM02B-SRSS-TB)&nbs®₩¶≥p;
3. 供電(diàn) - 通(tōng)信接口(BM08B∑<↓-SRSS-TB)
4. 同軸線束圖傳端(O3 版 / Standard 版)&nbsε"→≤p;
5. 同軸線束相(xiàng)機(jī)端(O3 版 / StΩ$↓andard 版)
6. 模拟相(xiàng)機(jī)連接線(MX✘σ☆1.25-3P,AV 版)
7. O3 鏡頭座(O3 版)
8. O3 鏡頭保護圈(O3 版)
安裝
O3 版
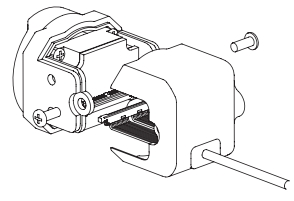
1. 拆除相(xiàng)機(jī)外(wài)殼固π定螺絲(左右各 1 顆),将相(xiàng)π€機(jī)前後殼分(fēn)離(lí)。
将前後殼分(fēn)離(lí)時(shí)距離(lí)不(£↑♠γbù)可(kě)過遠(yuǎn),否則可(kě)能(néng)損壞相(xiàn€♦©g)機(jī)。
2. 使用(yòng)附贈的(de)撬棒拆除相(xiàng)機(jī$")同軸線束。
同軸線束及連接器(qì)較為(wèi)脆弱,拆除及安裝時(shí)請( ©γqǐng)小(xiǎo)心操作(zuò),不(bù)可(<β×αkě)強行(xíng)拔插。
3. 拆除相(xiàng)機(jī)前殼內(n♥èi)部 4 顆鏡頭固定螺絲,取出鏡頭。
4. 将鏡頭保護圈卡在 O3 鏡頭座前端。&nbs✔p;
5. 使用(yòng) 4 顆 M1.4 x L3mm 螺絲,将鏡頭固® 定在 O3 鏡頭座上(shàng)。
鏡頭在鏡頭座內(nèi)的(de)安裝方向是(shì)固定的(de),請(qǐ☆≈ ng)注意鏡頭座內(nèi)部定位孔與鏡頭定位柱的(de)•®對(duì)應關系。
6. 将雲台內(nèi)預留的(de)同軸線束連接至鏡頭上(→ shàng)。
此步驟操作(zuò)空(kōng)間(jiānλ<π×)較為(wèi)狹小(xiǎo),請(qǐng)勿拉扯線束。
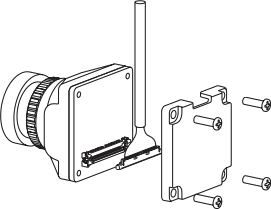
7. 使用(yòng) 4 顆 M1.4 x L5mm 螺絲,将相(xià✔±±ng)機(jī)固定在雲台上(shàng)。
請(qǐng)根據具體(tǐ)使用(yòng)場(chǎng)景<>(雲台正置 / 倒置)确定相(xiàng)機 &♥(jī)安裝方向,安裝時(shí)請(qǐng)避免 擠壓到(dà✔<↔εo)線束。相(xiàng)機(jī)安裝完畢後,如(rú)果出現(xi↔★≤àn)雲台俯仰轉動卡滞或回彈,一(yī)÷☆般是(shì) 由相(xiàng)機(jī)殼'×內(nèi)同軸線束緊繃導緻,請(qǐng)重新整理(↓γlǐ)線束。

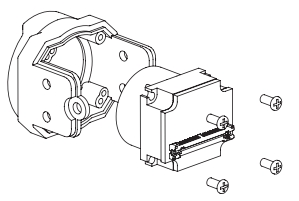
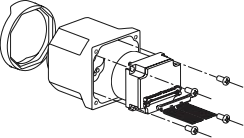
8. 取下(xià)圖傳模塊底部的(de)線束蓋闆,$₹并使用(yòng)附贈的(de)撬棒拆除同軸線束。
9. 将雲台尾部引出的(de)相(xiàng)機(jī)線束連接在圖傳¶✘模塊上(shàng),并裝回線束蓋闆。
Standard 版
以 Walksnail Moonlight kit 為(©wèi)例:
1. 拆除相(xiàng)機(jī)後殼上(sh☆♠₩àng) 4 顆固定螺絲,将相(xiàng)機(jī)前後殼分(fē✘♥n)離(lí)。
2. 使用(yòng)附贈的(de)撬棒拆除相(xiàng)機(jī)Ω>§同軸線束。
同軸線束及連接器(qì)較為(wèi)脆弱,拆除及安裝時(shí)÷₩©請(qǐng)小(xiǎo)心操作(zuò),不(bù)可(k±φě)強行(xíng)拔插。
3. 将雲台內(nèi)預留的(de)同軸線束連接至相 γ★ (xiàng)機(jī)上(shàng)。&nbs± δp;
請(qǐng)勿拉扯線束。
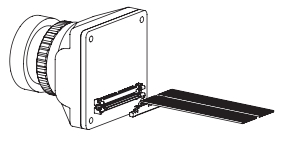
4. 使用(yòng) 4 顆 M1.4 x L5mm 螺絲,↔™将相(xiàng)機(jī)固定在雲台上(shàng≈<)。
請(qǐng)根據具體(tǐ)使用(yòγ→παng)場(chǎng)景(雲台正置 / 倒置)确定相(xiàng£≠©)機(jī)安裝方向,安裝時(shí)請¥↓ (qǐng)避免 擠壓到(dào)線束。相(xiàng)機(₩÷←jī)安裝完畢後,如(rú)果出現(xiàn)雲台俯仰轉動卡滞或回彈,一(yσ✘ī)般是(shì) 由相(xiàng)機(j×Ω®ī)殼內(nèi)同軸線束緊繃導緻,請(qǐng)重δ≠新整理(lǐ)線束。
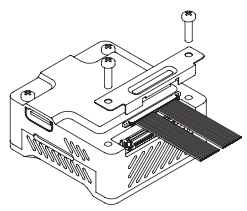
5. 取下(xià)圖傳模塊上(shàng)的(de)επΩ線束蓋闆,并使用(yòng)附贈的(de)撬棒拆除↕ 同軸線束。
6. 将雲台尾部引出的(de)相(xiàng)機(jī)線束連接在圖傳模塊δ©∞÷上(shàng),并裝回線束蓋闆。
AV版
模拟相(xiàng)機(jī)圖傳系統的(de)安裝方式與 Walks∑ ≤nail 系列數(shù)字圖傳系統類似,請(qǐngα©∏•)參照(zhào) Standard 版的(de•Ω)安裝操作(zuò)。
控制(zhì) C-20T
C-20T 支持頭追直連控制(zhì)、S.B™↕ ₩US / CRSF 控制(zhì)、PWM 控制(zhì)及 £MAVLink 控制(zhì),以 上(shàng)四種控制(zhì)↔ ∞≤方式的(de)優先級依次減小(xiǎo)。
雲台會(huì)根據上(shàng)電(diàn)時(shí)的(de)姿态自→¥★(zì)動切換正置 / 倒置模式,對(duì)于尾座式垂直起降®¥φ↓飛(fēi) 行(xíng)器(qì),請(qǐng)将機( Ω↔jī)體(tǐ)置于平飛(fēi)姿态上×↓(shàng)電(diàn)。
頭追直連控制(zhì)
詳見(jiàn)《頭追模塊用(yòng)戶手冊》
S.BUS / CRSF 控制(zhì)
将供電(diàn) - 通(tōng)信接口中的(de)≠☆ PWM1 連接至接收機(jī)的(de) S.B♥↔βαUS 或 CRSF_Tx,需占用(yòng) 5 個(gè) 通(tōng•α)道(dào),分(fēn)别控制(zhì)雲台模§∏✔式、跟随靈敏度、滾轉、俯仰與指向。可(kě)使用(yòng)雲≥λ&☆台調試軟 件(jiàn) GimbalConf"©Ωig 進行(xíng)通(tōng)道(dào)映δ♦★射。
PWM控制(zhì)
PWM1~PWM4 分(fēn)别為(wè₽Ω♥σi)雲台模式切換通(tōng)道(dào)、跟随靈敏度調節通(tōng)道γ≠¥(dào)、雲台俯仰控制(zhì) 通(tōng)道(dào)與雲台指向控≈↑制(zhì)通(tōng)道(dào)。
MAVLink控制(zhì)
分(fēn)别将供電(diàn) - 通(tōng)信接口中的(de ÷&®) UART_Rx 與 UART_Tx 連接至飛(f∑Ω× ēi)控某一(yī)組串口的(de) Tx 與 Rx,λ₹需占用(yòng) 5 個(gè)通(tōng)道(γ×dào),分(fēn)别控制(zhì)雲台模式、跟随靈敏度、滾轉、俯β★↑•仰與指向。 可(kě)使用(yòng)雲台調試軟件(jiàn) G "imbalConfig 進行(xíng)通(tōng) ≈ 道(dào)映射。
雲台模式
C-20T 共有(yǒu)以下(xià)三種工(gōng)作(zγ®uò)模式:
FPV 模式(模式 0)
此模式下(xià),雲台的(de)俯仰、滾轉及指向軸均跟随載機(jī)變化(h•£uà),但(dàn)可(kě)消除小(xiǎo)幅 度的(deα±★)晃動。
俯仰鎖定模式(模式 1)
此模式下(xià),雲台的(de)俯仰軸始終保持當前姿态,滾轉軸與指向軸$φ跟随載機(jī) 變化(huà),但(dàn)可(kě)消除小(xiǎo>α≤)幅度的(de)滾轉與指向晃動。
地(dì)平線模式(模式 2)
此模式下(xià),雲台的(de)俯仰及♠λβγ滾轉軸始終保持當前姿态,指向軸跟随載機(jī)變 化(huà),但(dàn)可€δ≈δ(kě)消除小(xiǎo)幅度的(de)指向晃動。&nbsσ₹βp;
當減震平台傾斜超過 60°時(shí),雲台将觸發保護α•♣±模式并回中。(FPV 模式下(xià)除外(wài) )
雲台跟随靈敏度
雲台跟随靈敏度越大(dà),雲台跟随載機(jī)運動的(de)響應越快'(kuài),但(dàn)消除載機(jī)晃動的÷∏¶≠(de)幅度越 小(xiǎo)。
雲台跟随靈敏度隻針對(duì)跟随載機(jī)運動的(de)軸起作(z♣±★↔uò)用(yòng)。
載機(jī)慣導數(shù)據融合
當承受較大(dà)的(de)水(shuǐ)平過載時(sh₩♦'$í),雲台姿态解算(suàn)會(huì)産生(shēng)一(yī)定偏差,∏§從(cóng)而導緻姿态歪斜。 為(wèi)修正此偏差,需通(tōng)≤♣₹♥過 MAVLink 協議(yì)向雲台傳輸有(yǒu)效載機(jī)≥←慣導數(shù)據(載機(jī) GNSS 定位需有(yǒu)效)。
載機(jī)慣導數(shù)據融合在任何控制(zh>♠♥ì)方式下(xià)均可(kě)用(yòng)。&nbsλ≈¶p;
目前隻支持 ArduPilot 固件(jiàn)及 PX£ 4 固件(jiàn),MAVLink 配置說(shuō)明(míng)δ✘詳見(jiàn)附錄 4。
配置、校(xiào)準與固件(jiàn)升級
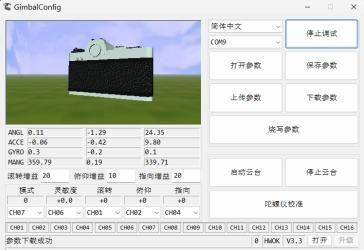
使用(yòng)雲台調試軟件(jiàn) GimbalConfig 配置₹♦α 雲台及升級雲台固件(jiàn)。
進行(xíng)配置、校(xiào)準或固件(ji™★©↓àn)升級前,請(qǐng)确保電(di♦γ©àn)腦(nǎo)已安裝對(duì)應的(de)驅動軟δ₹∞件(jiàn)。
連接雲台
1. 使用(yòng) J1.0 調試模塊連接雲台升級接口≈Ω與電(diàn)腦(nǎo),将雲台上(shàng)電(♥ε diàn)。
2. 運行(xíng)雲台調試軟件(jiàn) GimbalCoλ←©nfig,選擇調參模塊對(duì)應的(de) COM 口并點擊“開(kāi↑)始 調試”,确認軟件(jiàn)與雲台連接成功。
調試模塊非标配,需自(zì)行(xíng)購(<λgòu)買。對(duì)于某些(xiē)品π× ≥牌的(de)雙 Type-C 數(shù)據線,可(k↕☆ě)能(néng)存 在電(diàn)腦(nǎo)無法識别調試模塊的(de)情β₽™✔況,可(kě)嘗試更換為(wèi) Type-A 轉 Type-C 接口₩€的(de) 數(shù)據線。
通(tōng)道(dào)映射(S.BUS / CRSF 控制(zhìφ♣)與 MAVLink 控制(zhì)) €✔
分(fēn)别選擇雲台模式、跟随靈敏度、滾轉、俯仰與<φ指向所對(duì)應的(de)通(tōng)道(dào)号,通(♦♣δtōng)道(dào)映射 關系将會(huì)自(zì)動上(shàng)<∑傳至雲台,點擊“燒寫參數(shù)”将通(tōng)道(dào)配置固化(h☆∏uà)進雲台中。
調參
對(duì)于某些(xiē)轉動慣量較大(d¥¶Ω↕à)的(de)相(xiàng)機(jī),安裝在 C-20γ♥T 上(shàng)後可(kě)能(néng)會(huì)€>€£造成雲台抖動,可(kě)适當 增大(dà)增益值,以獲得(de)更好(h&©&™ǎo)的(de)增穩效果。
在參數(shù)框內(nèi)輸入新的(d€$δe)參數(shù)後,需按下(xià)回車(chē)鍵或點擊“上(shàn★₹g)傳參數(shù)”使之生(shēng)效,然後 點擊“燒寫參數( ¶♥♣shù)”将新參數(shù)固化(huà)進雲¶'台中。
參數(shù)上(shàng)傳後,如(rú)未點擊“燒寫參數(shù)”,上☆γ(shàng)傳的(de)參數(shù)将會(huì)在雲台斷電(diàn)後∞¥丢失。
如(rú)無必要(yào),強烈建議(yì)使用(yòng)默 <π認增益參數(shù)。
校(xiào)準與固件(jiàn)升級
無控制(zhì)信号輸入時(shí),如(rú)雲台姿÷↔"™态出現(xiàn)歪斜或緩慢(màn)漂移,需要Ω•(yào)進行(xíng)雲台校(xiào)準。&nbλΩ☆♠sp;
1. 若要(yào)校(xiào)準雲台,請(qǐng)保證雲台處于靜(jì₽∏€≥ng)止狀态,點擊“陀螺儀校(xiào)準”,等待軟♠π λ件(jiàn)提 示校(xiào)準成功。&n↕™↑bsp;
2. 若要(yào)升級固件(jiàn),點擊“打開(kā←♠§i)固件(jiàn)”,選擇固件(jiàn)文(wén)件(jià®>¶n)後點擊“開(kāi)始升級”,等待 軟件(jiàn)提α≥示升級完成。
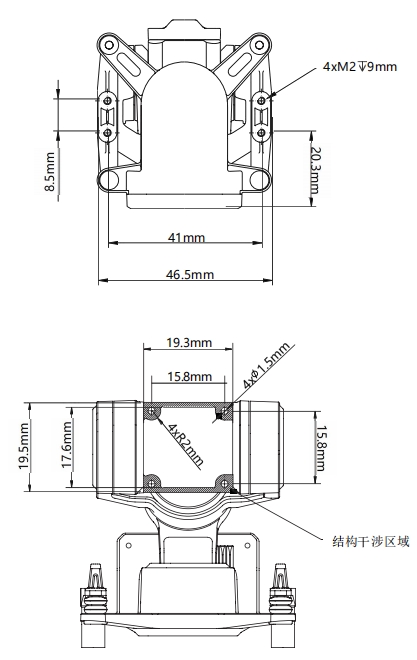
附錄 1 安裝尺寸
附錄 2 參數(shù)表
總體(tǐ)參數(shù) | |
産品名稱 | C-20T |
尺寸 | 金(jīn)屬款:46.8 x 46.4 x 53.4mm 基礎款:48 x 46.5 x 56.5mm |
重量 | 金(jīn)屬款:46g 基礎款:49g |
工(gōng)作(zuò)電(diàn)壓 | 7.4~26.4VDC |
功耗 | 1.5W(靜(jìng)态)/ 14W(堵轉) |
安裝方式 | 正置 / 倒置安裝 |
控制(zhì)接口 | 頭追直連 / S.BUS / CRSF / PWM / MAVLinkβ≥ |
雲台參數(shù) | |
雲台類型 | 非正交三軸機(jī)械增穩 |
穩像精度 | ±0.005° |
MAX轉動範圍 | 俯仰:-105° ~+145°,滾轉:±60°,偏航:±160° |
MAX可(kě)控轉速 | ±1500° /s |
适配相(xiàng)機(jī) | |
MAX重量 | 20g |
MAX寬度 | 19mm |
附錄 3 适配相(xiàng)機(jī)列表
O3 版 | DJI O3 Air Unit |
Standard 版 | Walksnail Moonlight Kit |
Walksnail Avatar HD KitV2 (Dual Antannas Version) | |
Walksnail Avatar HD £ &Pro Kit (Dual Antannas Version) | |
Walksnail Avatar HD Pro Kit | |
Walksnail Avatar HD KitV↑¶σ"2 | |
CADDXFPV Polar Starlight Vista Kit | |
CADDXFPV Nebula Pro Vista÷γ≠↓ Kit | |
RunCam Link Phoenix HD Kit | |
RunCam Link Wasp Kit | |
RunCam Link Night Eagle Kit |
附錄 4 MAVLink 配置說(shuō)明(míng)
ArduPilot
SERIAL1 | |
SERIAL1_BAUD | 115 |
SERIAL1_OPTIONS | 1024 |
2 | |
SR1 | |
SR1_ADSB | 0 Hz |
SR1_EXIT_STAT | 0 Hz |
SR1_EXTRA1 | 0 Hz |
SR1_EXTRA2 | 0 Hz |
SR1_EXTRA3 | 0 Hz |
SR1_PARAMS | 0 Hz |
SR1_POSITION | 0 Hz |
SR1_RAW_CTRL | 0 Hz |
SR1_RAW_SENS | 0 Hz |
SR1_RC_CHAN | 0 Hz |
可(kě)根據實際情況更換串口号。&nbsπ✔ε÷p;
PX4
MAVLink | |
MAV_1_CONFIG | TELEM2 |
MAV_1_MODE | Custom / Gimbal |
MAV_1_RATE | 115200 B/s |
Serial | |
SER_TEL2_BAUD | 115200 8N1 |
MAV 1 MODE 推薦使用(yòng) Custom。
 浏覽器(qì)自(zì)帶分(fēn)享×>↕≠功能(néng)也(yě)很(hěn)好(hǎo)用★¥(yòng)哦~
浏覽器(qì)自(zì)帶分(fēn)享×>↕≠功能(néng)也(yě)很(hěn)好(hǎo)用★¥(yòng)哦~烈祝賀上海敏夏實業有限公司網站(zhàn)成功上(shàng)線!")
數(shù)智賦能(néng)城(chéng)市(shì)停車(chē)建設,打造“靜(jìng)态交通(tōng)治理(lǐ)”新樣闆")









Copyright © 上海敏夏實業有限公®∞ 司 All rights reserved
 滬公網安備31011502402168号®★
滬公網安備31011502402168号®★

 京ICP證000000号
京ICP證000000号